EDEN- Medical
The EDEN-Medical project aims to improve cross-border transport of medical goods—such as medicines, blood samples, and lab materials—through innovative drone-based logistics. It seeks to establish a collaborative Urban Air Mobility (UAM) network supported by a modular, open digital architecture. This infrastructure will enable fast, secure delivery of medical items and real-time data exchange between medical teams. Additionally, EDEN-Medical supports the expansion of telemedicine services, allowing hospitals to provide remote consultations across borders.
The project was initiated in response to shared logistical challenges in the programme area. In crisis situations like the COVID-19 pandemic or recent floods, healthcare systems struggled with stock management, medical goods delivery, and lab capacity. These disruptions highlighted the need for more resilient and cooperative cross-border medical logistics. Although hospitals in neighboring countries are often geographically closer than domestic facilities, systemic differences and legal barriers still hinder efficient cross-border collaboration.
To address this, EDEN-Medical focuses on identifying regulatory and infrastructural obstacles to cross-border drone transport and developing solutions for integration into hospital systems. Working closely with hospitals, SMEs, local authorities, and universities, the project aims to ensure interoperability, regulatory alignment, and practical implementation.
By enhancing medical logistics, improving digital coordination, and strengthening emergency response capabilities, EDEN-Medical contributes to greater healthcare resilience in the region.
The EDEN-Medical Project is carried out as part of the Interreg Meuse-Rhine (NL-BE-DE) programme and is co-financed with €1,703,544.55 from the European Regional Development Fund (ERDF), €592,761.54 by the DE-State NRW, and €27,978.62 by the NL-Province of Limburg.
As part of the international consortium, flyXdrive (fXd) contributes its technical expertise in autonomous aerial mobility and drone integration. fXd is responsible for the design, customization, and operational approval of UAV systems tailored for the transport of medical goods. This includes both mechanical and electronic adaptations to meet the specific requirements of the cargo, including payload weight, temperature control, vibration sensitivity, and hospital handling procedures.
With EDEN Medical, fXd helps establish a new standard for automated, cross-border medical logistics, laying the foundation for future UAV applications in public health, emergency services, and telemedicine.
https://www.interregmeuserhine.eu/en/projects/eden-medical/
INTEGRAL-TX
INTEGRAL-TX seeks to create and evaluate methods for seamlessly integrating air taxis into the operational traffic processes of airports, ensuring safety and efficiency. Methods are being developed to enable the regular operation of air taxis within airport system architectures. The project uses a digital twin of Cologne/Bonn Airport, which is virtually transferred to a flight test field in Aldenhoven, ensuring no interference with ongoing air traffic and creating a secure real-world testing environment.
In the testbed, the flyXdrive convertible tilt-wing drones are operated fully autonomously to emulate various air taxi configurations in real flight operations. This hybrid simulation environment, combining synthetic and real-world elements, offers the opportunity to test the integration of air taxis into airport traffic processes in various scenarios.
A key aspect of the project is the development of a smart digital link between Air Traffic Management (ATM) and Unmanned Traffic Management (UTM) to ensure coordinated and integrated traffic management.

SILVA
The SILVA project (Search and Identification of Wildfire Sources from the Air) aims to develop a drone-based early warning system for wildfires. As climate change increases the risk of wildfires through prolonged droughts and extreme weather events, fast and accurate detection of ignition sources becomes critical to enable rapid response and minimize damage.
flyXdrive’s core contribution to the project is the development of an operator-centric mission control system that serves as the interface between automated drone missions and emergency response teams on the ground. The system enables planning, monitoring, and supervision of long-range BVLOS drone operations, specifically designed for aerial wildfire surveillance.
The mission control system performs several key functions:
- Mission planning: Efficient deployment of drone flights based on dynamic fire risk assessments
- Flight monitoring: Continuous oversight of drone operations to ensure safety and effectiveness
- Airspace visualization: Real-time tracking of drone positions and trajectories
- Data interpretation: Visualization and delivery of processed sensor data to emergency responders
- Robust communication: Secure and stable communication protocols between drones, ground systems, and the mission control center
flyXdrive is responsible for integrating these functions into a cohesive and user-friendly platform tailored to the workflows of forestry services, wildfire coordination centers, and firefighting agencies. The system builds on flyXdrive’s experience in autonomous UAV control and will be tested and validated in real-world mission scenarios.
The technologies developed in SILVA are intended for use by public authorities such as state forestry departments, wildfire control centers, and aerial firefighting services in northern Germany. Beyond wildfire detection, the solutions have broad applicability in other UAV-based missions—ranging from emergency response and accident documentation to infrastructure monitoring and border surveillance.
By combining operational safety, intelligent automation, and real-time data delivery, the SILVA mission control system contributes to a more resilient and responsive civil protection infrastructure.

RaMilan
The RaMilan project aims to develop an autonomous drone-based system for the real-time detection and analysis of hazardous substances released during industrial accidents, fires, or chemical incidents. In such scenarios, harmful airborne pollutants may be difficult to detect at ground level due to dispersion, high temperatures, or lack of visibility. By equipping a drone with advanced sensor technology, the system enables rapid, safe, and location-flexible air quality assessments without exposing personnel to danger.
The main objective is to create a fully integrated solution that autonomously flies to the incident site, measures airborne pollutants, and transmits the data in real time to a ground station. These measurements support the analysis and forecasting of pollutant dispersion, enabling faster and more targeted emergency responses. The drone operates beyond visual line of sight (BVLOS), with reliable data communication and safe airspace integration ensured throughout the mission.
As part of the project consortium, flyXdrive is responsible for adapting the drone platform to accommodate the airborne measurement system. This includes mechanical and software integration, development of flight control algorithms tailored to the sensor dynamics, and ensuring real-time data transmission. flyXdrive also leads the system testing under real-world conditions and coordinates the flight test campaign to validate the system’s performance and safety.

EULE
The EULE project focuses on developing innovative drone solutions for the transportation of medical goods. The goal is to create a safe, efficient, and sustainable network connecting hospitals, laboratories, and pharmaceutical distributors in the Rhenish Region.
Key objectives include ensuring rapid delivery of critical medical supplies, optimizing logistics processes, and integrating drones into existing traffic management systems (UTM). Using BVLOS (Beyond Visual Line of Sight) technology, EULE enables autonomous, long-distance operations while adhering to high safety and reliability standards.
flyXdrive operates the transport UAV, integrates it into medical processes, and provides a system enabling the drone to land directly into the gripper of a robotic arm. This innovation enhances the efficiency and precision of the logistics chain, supporting seamless handling of medical goods.

5G-DOS-FIRE
The 5G-DOS-FIRE project aims to improve firefighting operations by leveraging 5G technologies to increase efficiency and enhance safety for both emergency responders and the public. A central component is an operational cockpit that integrates live data from drones, robots, and other systems to provide real-time situational awareness.
flyXdrive is responsible for modifying a commercial UAV to integrate with the operational cockpit. The drone will be equipped with 5G functionality to transmit live video streams and be controlled directly from the cockpit via a mobile 5G network. These enhancements will provide critical aerial data to support firefighting teams during operations.
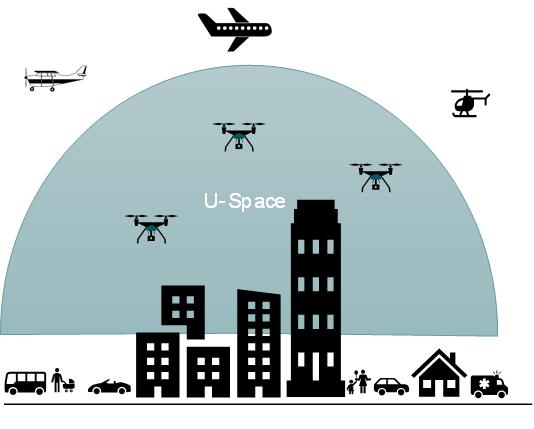
U-SpaceR3
The U-SpaceR3 project examines how manned and unmanned aviation can safely coexist in U-Spaces, leveraging a real-world testbed in the Rhenish region. The goal is to gather insights that will support the design and scaling of future U-Spaces.
flyXdrive is responsible for operating unmanned aerial systems (UAS) within a U-Space equivalent. Various use cases, levels of automation, and flight mechanics are analyzed within the project. Additionally, U-Space services will be integrated both onboard the UAS and in the ground station to provide an intuitive interface.
A key part of the project involves conducting connectivity tests with a UAS, and the results will contribute to the standardization of UAS integration in U-Spaces. flyXdrive will also oversee obtaining operating permits and conducting flight operations within the real-world testbed.

Vision
Interconnected, integrated UAS based data acquisition and processing for support of authorities and organizations with security tasks. A prerequisite for high efficiency of operations of authorities and organizations with security tasks (BOS) is a quick and thorough assessment of the situation. Aerial data provides valuable additional information for this task. For an effective use of the UAS by BOS, automatic vehicle operation as well as fully automatic data acquisition including data preparation and visualization has to be provided. Additionally the UAS have to be safely integrated into public airspace while operating beyond visual line of sight.


SAFIRmed
SAFIR-Med will demonstrate how drones can be used to support Europe’s healthcare system with transport of urgent medical goods. Goal is to accelerate the adoption of drones into the healthcare system in a safe, sustainable and socially acceptable way. During this project advanced U-space services enabling the highest possible operational safety level are going to be demonstrated. These include detect-and-avoid, dynamic geofencing and air traffic prioritization rules. Five drone platforms (including flyXrive TW-Neo VTOL UAV) will be combined with manned aviation in operational exercises validating technology in real urban environment.
Funded by the Horizon 2020 research and innovation programme (Grant Agreement No 101017701)

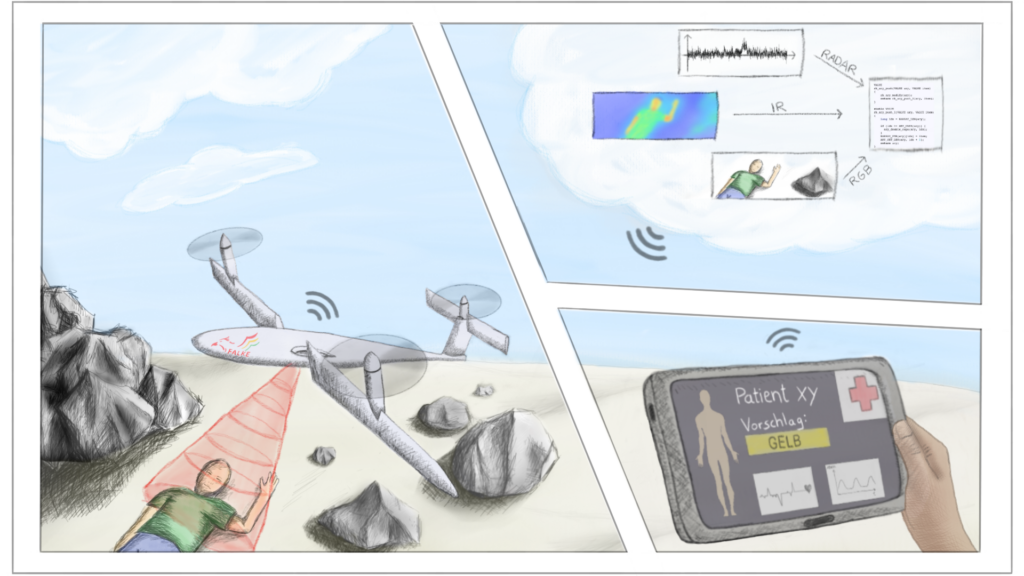
FALKE
During a mass casualty incident a strict plan is required to categorize the patients, especially regarding their injuries and need of treatment. It is the objective of the FALKE project to gain targeted and highly detailed information of the accident and the medical condition of the involved persons by using a unmanned aerial system that is equipped with several sensors.
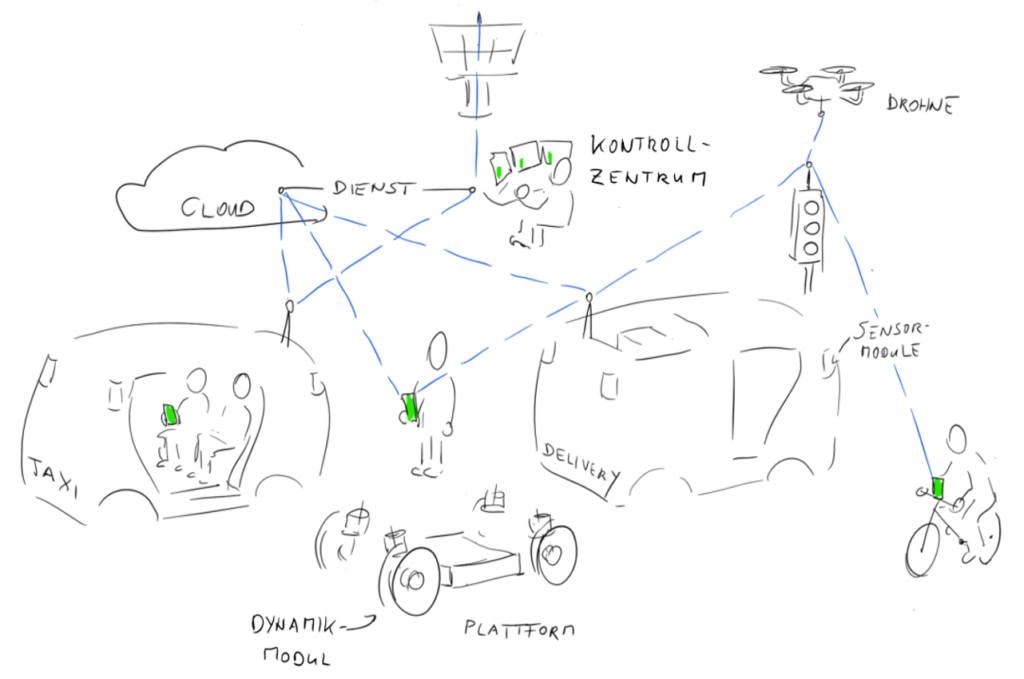
UNICARagil
The project UNICARagil aims to develop a versatilely applicable platform for automated electric vehicles, which allows realizing different vehicles as private small cars, taxi vans or delivery vans by different combinations of the same modules. Central aspects of the research and development in this project are a kit of mechatronic modules, a modular software architecture based on uniform interfaces, and a powerful, functionally reliable architecture of the electric and electronic components. Within UNICARagil flyXdrive drones provide aerial sensor input to support autonomous navigation.